Konstrukce STGC
Pro docílení vysoké úhlové přesností, je potřeba použít více stop a tím i více snímačů, aby bylo dosaženo alespoň přesnosti jednoho úhlového stupně, tedy nejméně 360 odlišných poloh na
jednu otáčku. Tato realizace vyžaduje kódové slovo o velikosti minimálně 9 bitů (29 = 512 > 360), a tím i stejný počet snímačů a kódových stop
pokud jsou-li všechny snímače umístěny ve stejné úhlové poloze.
Snížení počtu stop
U některých případů realizace kódových stop existuje možnost, že přesuneme snímač z výchozí polohy (obrázek 1, kotouč 1) do jiné úhlové polohy (ale ve stejné vzdálenosti od středu), potom je potřeba posunout stopu tohoto snímače ve stejném úhlu, aby byl dosažen stejný průběh kódu
stopy na tomtéž výstupu (obrázek 1, kotouč 2).
V případě, že nejvýznamnější bit je pootočen o úhlový rozdíl polohy stop, dojde ke shodě s vnější stopou.
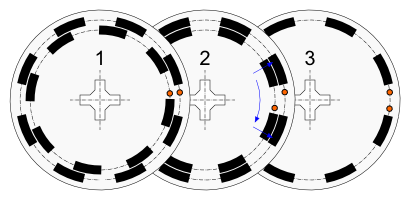
Obrázek 1
Znázornění postupu redukce stop.
Vzhledem k tomu, obě stopy jsou pak shodné, vnitřní stopa může být vypuštěna, a snímač vnitřní stopy přesunut na již identickou vnější stopu, ale se stejným úhlovým posunutím oproti druhému snímači na této stopě
(obrázek 1, kotouč 3).
Tyto dva senzory na jedné stopě, dovolují realizovat kvadraturní enkodér viz Inkrementální snímač.
Aplikace tohoto postupu na absolutní rotační snímač s grayovým kódem umožní snížení počtu potřebných stop pro rozlišení
jednoho úhlového stupně snímače na 8 kódových stop.
Další snížení počtu stop není s BRGC možné.
Realizace s jednou kódovou stopou
Realizace plně jednostopého absolutního snímače je prostorově složitější konstrukcí v porovnání s vícestopými snímači, na druhou stranu je výrobně
jednodušší. Pro počet možných stavů, které je možno vyjádřit platí, že:
P = 2n - 2
Kde P je počet stavů a n je počet bitů. Kód neobsahuje stavy (kombinace), kdy by byly aktivovány nebo deaktivovány všechny snímače najednou, toto pak indikuje
chybový stav.
Konstrukce n=3 / P=6
Pro jednoduchost použijeme kódové slovo o velikosti pouhých 3 bitů. Rozmístění snímačů a odpovídající kódová stopa je zobrazena na obrázku 2a. Tento příklad
dovoluje rozlišit 6 jednoznačných stavů na 3 bitech.
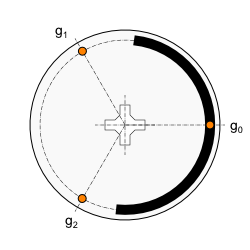
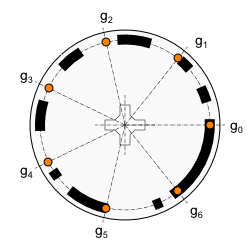
Obrázek 2a
Jednostopý kotouč pro P=6 a n=3.
Segmentovaný průběh stavů (otáčení kotouče proti směru hodinových ručiček) je zobrazen na obrázku 2b a odpovídající průběh signálů na obrázku 2c. Ve
výchozím stavu (podle obrázku) je aktivován pouze senzor g0, při pootočení dojde k aktivaci senzoru g1 při stálé aktivaci senzoru g0.
Při dalším pootočení zůstane aktivován senzor g1 ale senzor g0 již aktivní není. Další průběh stavů je analogický k průběhu stavů g0
a g1 s posunutím.

Obrázek 2b
Segmenty aktivování senzorů

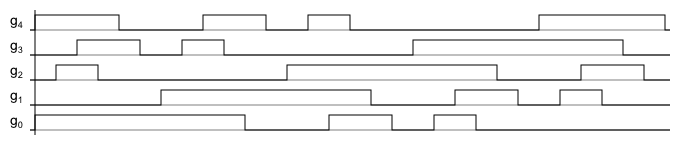
Obrázek 2c
Průběh elektrických signálů na senzorech
Konstrukce n=5 / P=30
Při použití většího počtu bitů kódového slova je již složitější vytvořit správné rozložení segmentů kódové stopy, která je členitější.
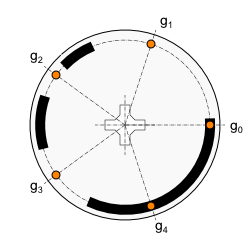
Obrázek 3a
Jednostopý kotouč pro n=5 / P=30
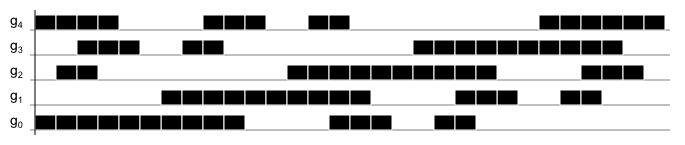
Obrázek 3b
Segmenty aktivování senzorů pro n=5 / P=30
Obrázek 3c
Průběh elektrických signálů na senzorech pro n=5 / P=30
Konstrukce n=7 / P=126
Obrázek 3a
Jednostopý kotouč pro n=7 / P=126
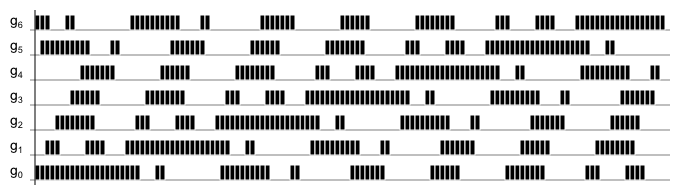
Obrázek 3b
Segmenty aktivování senzorů pro n=7 / P=126
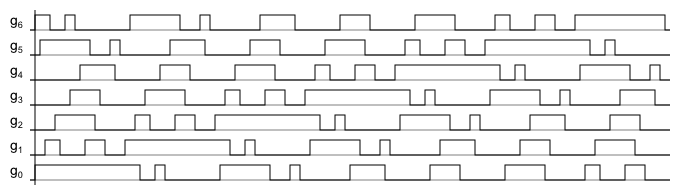
Obrázek 3c
Průběh elektrických signálů na senzorech pro n=7 / P=126
|


