HMI-AUTOMATIZACE - MECHANIKA - PÁKOVÝ, KŘÍŽOVÝ OVLADAČ - JOYSTICK
|
Provoz webu zajišťuje:

|
Pákový, křížový ovladač - joystick
Charakteristika
Pákový, křížový ovladač - joystick je ovládací prvek určený k intuitivnímu a ergonomickému řízení a ovládání pohyblivých částí
zařízení. Typickým příkladem je ovládání portálového jeřábu nebo manipulátoru. Názvosloví pákový a joystick přesně nerozlišuje,
jestli se jedná o ovladač v jednom nebo ve dvou na sebe kolmých směrech ovládáni.
Výstupem o poloze (úhlu a směru naklopení) ovládací páky je generována v binární (diskrétní) formě, minimálně jeden signál pro
každý směr nebo jako i spojitá informace o poloze.
|
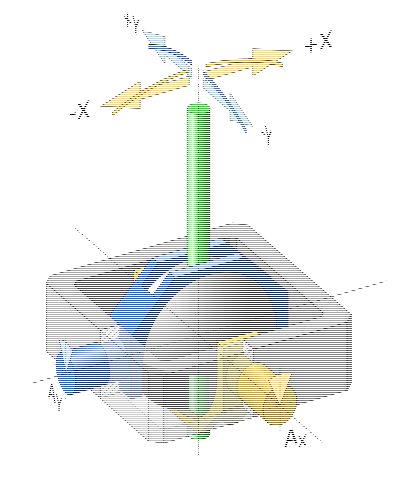
Princip ovladače
Ovladač se skládá z ovládací páky, kterou obsluha vyklápí kolem společného bodu ve spodní části. Konstrukce ovladače je
principielně zobrazena na obrázku. Ovladač pro jednu osu Y je na obrázku 1a), kdy se páka ovladače otáčí (je výkyvná) kolem
osy AY. Nejedná se o nic jiného než o modifikovaný třípolohový páčkový ovladač s návratem z krajní polohy do středu při uvolnění.
Pokud obsluha vyklopí ovladač ve směru +Y, přes pákový mechanizmus, který se otáčí kolem osy AY dojde k aktivaci
přidruženého kontaktu K+Y. Při uvolnění páky ovladače stlačená vratná pružina vrátí ovladač do výchozí polohy.
Ve druhém směru -Y je situace analogická.
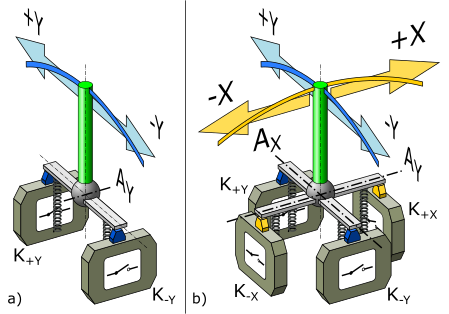
Obrázek 1
Princip ovladače (joysticku), a) pro jednu osu, b) pro dvě osy.
Ovladač pro dvě osy X a Y je rozšířením předchozího případu, viz na obrázek 1b). V tomto případě, kdy je potřebné pohybovat
pákou ovladače ve dvou směrech (do kříže) musí již uložení páky ve společném bodě splňovat podmínky volnosti ve dvou osách
AX a AY. Mimo separátního vychýlení ve směru jedné nebo druhé osy bývá, a je požadováno i současné, tedy
diagonální vychýlení a současné sepnutí sousedních kontaktů obou os. Tomu odpovídá kinematika kulového kloubu.
Pro jednoduché aplikace, kde postačí v jednom směru aktivace jednoho kontaktu se tento typ vyrábí v průmyslovém
provedení s montážním otvorem průměru 22mm. Pro náročnější aplikace ovládání bývá a zpravidla je potřeba rozlišit více poloh
vychýlení v jednom směru. Tento požadavek již vyžaduje mechanicky propracovanější řešení uložení společného bodu i pevnostně
odolnější řešení.
|
Konstrukce
Provedení konstrukce a princip, určuje jak bude pákový ovladač přesný na převod úhlu vychýlení na elektrický
signál. Při konstrukci je potřeba vzít v úvahu účel použití, v našem případě použití v průmyslu. Tomuto musí odpovídat
mechanická odolnost, přesnost a linearita vedení výchylky páky směrem k elektrickým prvkům.
Problematickým pro konstrukci je kompromis mezi celkovými rozměry konstrukce (co nejmenší), možnou výchylkou (minimálně nutnou
a postačující) a požadovaným rozlišením, respektive přesností (co největší, nejlepší). Při návrhu je potřeba si uvědomit, že
prodloužením páky ovladače se pouze zvětšuje obvodová vzdálenost, kterou vrcholový bod páky při pohybu opíše, nikoliv úhel vychýlení.
Jedná se pouze o relativní zvýšení přesnosti, protože celková přesnost závisí i na způsobu vyhodnocení výchylky a jejím převodu na
elektrický signál. Příliš dlouhá páka ovladače není ani příjemná pro obsluhu.
Vstupním elementem je páka ovladače, na druhé straně mechanismu máme dvě osy AX a AY,
na které se přenáší sférická poloha koncového bodu ovládací páky. Vzhledem k tomu, že délka ovládací páky je konstantní, je možno
tuto hodnotu vyloučit a výsledkem je rozklad sférické polohy bodu konce páky ovladače do úhlu natočení kolem osy X a Y.
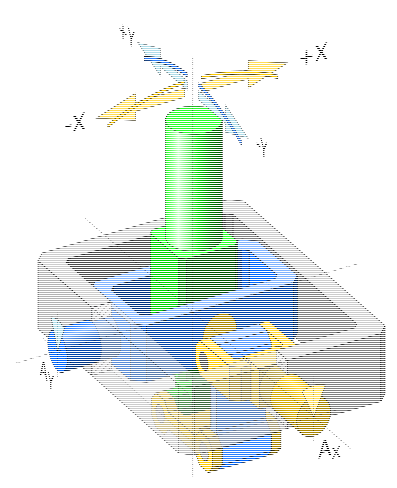
Kulové uložení
Kulové uložení je znázorněno na obrázku 2. Základem konstrukce je vnější klec - rám (šedý), ze kterého vystupují dvě osy
AX (žlutá) a AY (modrá) na sebe vzájemně kolmé. Uvnitř klece je každá osa spojena s jedním segmentem, osa
AX s horním a osa AY se segmentem spodním. Segmenty mají vnitřní stranu tvořenou kulovou plochou a přesně
přiléhají na středovou, vnitřní kouli ovladače (černá). Středem koule prochází páka ovladače (zelená). Páka má v horní části větší
délku, prochází horním segmentem pro osu Y a je na ní nasazena rukojeť (není zakreslena) a v dolní části o málo přesahuje obrys
koule tak, aby byla v kontaktu se spodním segmentem pro osu X.
Obrázek 2
Kulové uložení.
Při vychýlení ovládací páky pouze ve směru X nedojde k přenosu žádné výchylky do směru osy Y, protože se ovládací
páka (zelená) pohybuje v ose výřezu horního segmentu (modrá). Naproti tomu bude dolní část páky působit na boční stěnu výřezu
spodního segmentu (žlutá) a ten se bude otáčet v uložení osy X ve stejném směru a pod stejným úhlem, jako je ve směru osy X
vychýlena ovládací páka. Úhel natočení výstupní osy AX pak odpovídá úhlu vychýlení ovládací páky ve směru X. Při pohybu
pouze ve směru Y je situace obdobná. Spodní část ovládací páky se pohybuje v ose výřezu spodního segmentu a nijak jeho
polohu neovlivňuje. Horní část páky, která prochází výřezem horního segmentu tento segment vychýlí ve stejném směru a o stejný
úhel jako je sama ve směru Y vychýlena. Úhel natočení výstupní osy AY pak odpovídá úhlu vychýlení ovládací páky ve
směru Y.
Při současném vychýlení ovládací páky ve směru X i Y bude výsledné působení ovládací páky na horní i spodní segment analogický
předchozím případům s tím, že se oba segmenty budou vychýleny současně v úhlu a směru, který odpovídá poloze ovládací páky ve
směru X i Y.
Opracování kulového tvaru (plochy) jak vnějšího tak vnitřního není jednoduchá záležitost, proto existuje i technické řešení,
které přesně zachovává princip kulového uložení i konstrukci ale nevyžaduje opracování kulové plochy. Na rozdíl do případu uložení
ve dvojité kolébce (viz další odstavec) obsahuje kulové uložení minimální počet dílů (a dva jsou i shodné) a je snaží toto uložení
rozměrově miniaturizovat (až do velikosti vyhovující instalaci v profesionálních ovladačích pro RC modely a dále až na úroveň
hrubého ovládání hraček). Z hlediska namáhání je zde ta nevýhoda, že se zatížení ve svislém směru ovládací páky vždy přenáší
přes spodní tvarovou plochu, která trpí vyšším opotřebením z důvodu tření. Pro použití je potřeba si uvědomit, že je rozdílné
zatížení modelářského joysticku palcem modeláře nebo zatížení průmyslového joysticku položením celé ruky obsluhy.
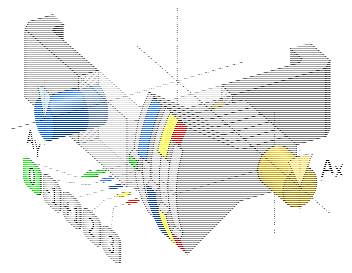
Uložení ve dvojité kolébce
Uložení ve dvojité kolébce je znázorněno na obrázku 3. Základem konstrukce je vnější klec - rám (šedý), ze kterého vystupují
dvě osy AX (žlutá) a AY (modrá) na sebe vzájemně kolmé. Uvnitř klece je jedna kompaktní kolébka (modrá)
pro osu AY a jedna dělená kolébka (žlutá) pro osu AX. Ovládací páka (zelená) je uchycena na čepu (žlutá)
v jednoduché kolébce (modrá), přičemž čep uchycení je sousledný (je to podmínka správné funkce) s osou AX (žlutá).
Obrázek 3
Uložení ve dvojité kolébce.
Při vychýlení ovládací páky pouze ve směru Y je tento pohyb přes boční stěny ovládací páky (přes rovné plochy) přenesen
na jednoduchou kolébku, která se vychýlí stejně jako ovládací páka kolem osy AY. Spodní část ovládací páky zároveň
v protisměru po kružnici posune spodní vodorovný spojovací třmen dělené kolébky (žlutá) a ten vychýlí svislý třemen (modrá).
Protože v tomto směru není žádný pevný bod (princip páky), vychýlení ovládací páky pouze ve směru Y nemá účinek na otočení osy
AX. Při vychýlení ovládací páky pouze ve směru X se páka otáčí kolem vnitřního čepu osy AX ve vnitřní
kolébce a na osu AY se nepřenáší žádný pohyb. Spodní část ovládací páky kružnici vychýlí vodorovný spojovací segment
(žlutá), který toto úhlové vychýlení přenese přes svislý třemen (modrá) na natočení osy AX (žlutá).
Při současném vychýlení ovládací páky ve směru X i Y bude výsledné působení ovládací páky na kolébky analogické předchozím
případům s tím, že všechny díly budou vychýleny současně v úhlu a směru, který odpovídá poloze ovládací páky ve směru X i Y.
Konstrukce tohoto uložení je mechanicky náročnější co do počtu použitých elementů, nutnosti vymezení vůlí i z rozměrových
důvodů pro zajištění prostoru pro pohyb dělené kolébky. Podstatnou výhodou je ale to, že konstrukce může být dostatečně dimenzována
a síly vyvozené "položením ruky obsluhy" je možno v místech otáčení zachytit
ložisky.
|
Převod polohy na elektrické signály
Převod polohy na elektrické signály poskytuje výstupní informaci minimálně o tom, v jakém směru je páka vychýlena. Pro přesnější určení míry vychýlení ovládací páky se používá více binárních signálů v každém směru, pro některé aplikace pak spojité odměřování
polohy s použitím potenciometru (analogový signál) nebo digitální informace získaná ze snímače polohy. Digitální výstupy
Digitální výstupy potřebují pro svoji aktivaci nějaký podnět, v našem případě mechanický, vyvozený vačkovým mechanizmem. Principielně se jedná o nenáročné řešení, kdy se postupně podle vychýlení ovládací páky a výsledného úhlu
natočení konkrétní osy postupně spíná/rozpíná několik kontaktů. Výstupem informace o poloze je tedy binární, diskrétní signál
o poloze. Kombinace sepnutých kontaktů pak vyjadřuje míru vychýlení ovládací
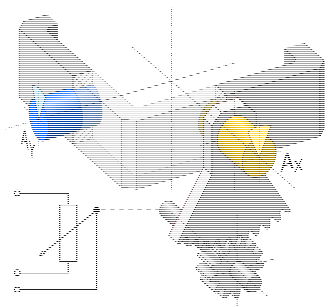
páky, tedy jak moc ji obsluha vychýlí z nulové polohy. Příklad vačkového mechanizmu pro snímání více poloh, konkrétně v provedení
3-0-3 jedné osy je uveden na obrázku 4 (z důvodu viditelnosti jsou vačky pootočeny o 90°).
Obrázek 4
Vačkový mechanizmus 3-0-3 a působení na kontakty (na obrázku aktivován kontakt 0, ostatní deaktivovány).
Na obrázku je zobrazen mechanizmus složený z několika vaček s různým úhlem, kdy aktivují přidružený kontakt, jednotlivé aktivní
plochy jsou barevně zvýrazněny. Na obrázku je zobrazena nulová poloha, kdy je aktivován nulový kontakt polohy (zelený). Podle počtu
použitých vaček a kontaktů lze realizovat různé sestavy pro různé případy užití. Harmonogram spínání kontaktů podle konkrétní
sestavy a úhlu vychýlení ovládací páky je uveden v následujících případech sestav. Značení sestavy krajními číslicemi vyjadřuje kolik
je použito kontaktů pro vychýlení kolem jedné osy v jednom a druhém směru, prostřední číslice počet kontaktů v nulové poloze.
Pokud se jedná o ovladač pro dvě osy, má tento dvě sady kontaktů a tedy i dva kontakty nulové polohy, pro každou osu samostatně.
Pro řešení vačkového mechanizmu je možno použít princip uvedený na obrázku 4, kdy je vačková sestava řešena sestavením několika
z několika samostatných vačkových segmentů. Výměnou segmentu je pak možno změnit úhel, kdy bude kontakt aktivován. Druhým možným
řešením, vhodným pro vícestupňové ovládání 3-0-3 a lepší, je použít segment (2) jako poslední segment a kontakty (3), (4) a
případně další rozmístit obvodově kolem segmentu (2) tak, aby docházelo k jejich postupné aktivaci se zvyšující se výchylkou
ovládací páky v dané ose.
Vačkové/kontaktní sestavy
| Sestava: | 1-1 (1-X-1) |
| Popis: | ovladač má pouze kontakty (-1/+1) poskytující informaci o tom, v jakém směru je páka ovladače
vychýlena, modré kontakty na obrázku 4. |
| Použití: | pro nenáročné aplikace, zařízení nevyžadující změnu rychlosti ovladačem, pracující za
ohrazením. |
| Kontrola: | pouze současná aktivace obou směrových kontaktů. |
| Harmonogram spínání: | 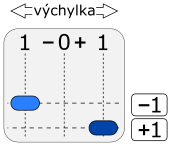
Obrázek 5a, spínání 1-1 |
| Sestava: | 1-0-1 |
| Popis: | ovladač má kontakt (0) indikující nulovou polohu ovládací páky a kontakty poskytující informaci
o tom, v jakém směru je páka ovladače vychýlena (-1/+1), zelený a modré kontakty na obrázku 4. |
| Použití: | pro nenáročné aplikace, zařízení nevyžadující změnu rychlosti ovladačem. |
| Kontrola: | současné aktivace obou směrových kontaktů, pokud není sepnut kontakt nulové polohy
musí být sepnut jeden ze směrových kontaktů, současné sepnutí kontaktu nulové polohy a jednoho ze směrových kontaktů. |
| Harmonogram spínání: | 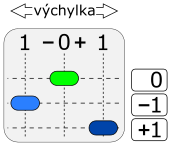
Obrázek 5b, spínání 1-0-1 |
| Sestava: | 2-0-2 |
| Popis: | ovladač má kontakt (0) indikující nulovou polohu ovládací páky, kontakty poskytující informaci
o tom, v jakém směru je páka ovladače vychýlena (-1/+1) a společný kontakt (2) indikující koncovou výchylku ovládací páky. |
| Použití: | pro aplikace vyžadující změnu rychlosti ovladačem. |
| Kontrola: | jako předchozí + pokud je sepnut kontakt (2) musí být sepnut alespoň jeden ze směrových
kontaktů, kontakt (2) nesmí být sepnut současně s kontaktem nulové polohy. |
| Harmonogram spínání: | 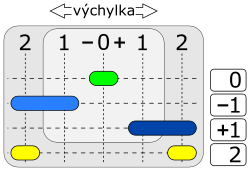
Obrázek 5c, spínání 2-0-2 |
| Sestava: | 3-0-3 |
| Popis: | ovladač má kontakt (0) indikující nulovou polohu ovládací páky, kontakty poskytující informaci
o tom, v jakém směru je páka ovladače vychýlena (-1/+1) a společné kontakty (2) a (3) indikující míru výchylky ovládací páky. |
| Použití: | pro aplikace vyžadující jemnější změnu rychlosti ovladačem. |
| Kontrola: | jako předchozí + pokud je sepnut kontakt (3) musí být sepnut kontakt (2) alespoň jeden ze
směrových kontaktů, kontakt (3) nesmí být sepnut současně s kontaktem nulové polohy. |
| Harmonogram spínání: | 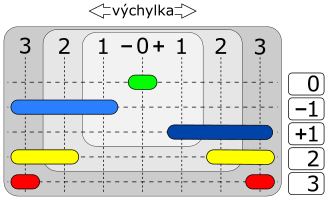
Obrázek 5d, spínání 3-0-3 |
|
Spojitý výstup
Spojitý výstup snímání polohy poskytuje přesnou informaci o úhlu vychýlení ovládací páky. Nejjednodušším řešením je připojení
běžce potenciometru k výstupní ose AX, AY joysticku. Je nutno si však uvědomit, že úhel vychýlení ovládací
páky se běžně pohybuje pouze v rozsahu ±15 ... ±25°, u ovladačů specielního provedení ±35° ... ±45°. Tento úhel výchylky není
tedy příliš velký a přímé napojení osy s potenciometrem není vhodné pro průmyslové aplikace, je však postačující pro aplikace
RC ovládání. Problematické v tomto případě je to, že pro vyvození požadované elektrické změny musí mít potenciometr celkově
velký odpor aby malá úhlová výchylka vyvolala postačující změnu odporu a tím elektrického signálu.
Pro průmyslové aplikace je v tomto případě vhodné použít jednoduchý mechanický převod tvořený ozubením, viz obrázek 6 a
hřídel potenciometru napojit na hřídel pastorku.
Obrázek 6
Ozubený převod pro zvětšení úhlu natočení.
Pro realizace postačí vytvořit výseč ozubeného kola (s nějakou rezervou) odpovídající pracovnímu úhlu vychýlení ovládací páky
respektive osy AX, AY. Při pootočení konkrétní výstupní osy joysticku se pootočí i výseč ozubeného kola a
obvodová vzdálenost odpovídající vychýlení je dána úhlem natočení a poloměrem. Tato obvodová vzdálenost se přes ozubení
přenese na pastorek. Protože pastorek má menší poloměr, musí se pro stejnou obvodovou vzdálenost otočit o větší úhel. Poměr
zvětšení úhlového natočení je pak dán jednoduchým poměrem RS/RP. Při konstrukci je potřeba dbát na to, aby
celkový úhel možného natočení pastorku nepřekročil úhlový, pracovní, rozsah připojeného potenciometru s nějakou rezervou.
Prakticky je možno nahradit potenciometr rotačním absolutním snímačem polohy, výstupem sice není absolutně spojitý signál o úhlu
natočení, při volbě dostatečného rozlišení, je však za spojitý možno požadovat. Rotační inkrementální snímač pro toto použití není
vhodný.
| Upozornění |
| Samotné použití spojitého snímání polohy není pro aplikace v průmyslu dostačující a je potřeba jej
doplnit kontakty, minimálně pro určení nulové polohy a maximální výchylky osy. |
|
Kalibrace
Kalibrace je potřebná pro zajištění souběhu mechanické polohy a elektrickými signály.
Mechanická kalibrace
Kalibrace mechaniky je zajišťována již v průběhu výroby tím, že jsou dodržovány výrobní tolerance a účelem je to, aby
úhel vychýlení ovládací páky byl stejný jako úhel natočení výstupní osy AX a AY. Při montáži se vzájemná
poloha výstupní osy a např. vačkových segmentů zajišťuje lícujícím osazením, pérem (strojnický výraz), které nedovolí "protočení",
tedy zamezí změně vzájemné úhlové polohy dílů. U vačkového mechanizmu je dále potřebné, aby byl symetrický k nulové poloze. Při
použití ozubení je potřeba zvolit takovou konstrukci, která zajišťuje mechanické vymezení vůle v ozubeném převodu (na obrázku 6
není znázorněno).
Elektrická kalibrace
Elektrická kalibrace představuje nastavení offsetu, tedy posunutí elektrického signálu tak, aby jeho nulová, respektive střední
hodnota odpovídala nulové poloze ovladače. Příčinou této potřeby je to, že principielně není možno zajistit mechanické propojení
výstupní osy joysticku s potenciometrem nebo snímačem polohy vždy tak, aby k tomuto došlo právě v nulové poloze tohoto prvku.
Při zpracování v řídícím systému se při zprovoznění zavede korekce polohy pro každou osy tzv. offsetem, který kompenzuje tuto
nepřesnost montáže. Pokud se používá analogová hodnota přímo pro řízení výkonového prvku, doplňuje se kalibrační odpor, kterým
se potřebná odchylka vyrovná.
| Poznámka |
| Pokud se použije snímač polohy s digitálními výstupy, předpokládá se zpracování v nějakém
digitálním zařízení. |
|
Řízení
Podle použitého přenosu výchylky na elektrický signál máme k dispozici čistě binární signály nebo signál spojitý pro každou
osu samostatně, tyto signály jsou generovány mechanikou joysticku při vychýlení ovládací páky.
Pro praktické použití a i z hlediska bezpečnosti jsou hlavice ovládací páky doplněny dalšími tlačítky.
Bezpečnostní tlačítko
Bezpečnostní tlačítko, taktéž "tlačítko mrtvého muže" nebo "živák" je kontrolní bezpečnostní prvek, který sleduje aktivitu
obsluhy. Umisťuje se na horní hlavici ovládací páky a je ovládán palcem, nebo na zadní stranu hlavice a ovládá se sevřením
prsty. Pokud chce obsluha zařízením pohybovat, ovládat jej, musí být tlačítko rukou obsluhy sepnuto. Pokud v libovolném
okamžiku dojde k uvolnění tohoto tlačítka, zařízení musí okamžitě zastavit, bezpečně zastavit, zastavit po řízené rampě a to
v závislosti na požadované bezpečnosti ale i s ohledem např. na hmotnost a rychlost pohybujících se těles.
Funkční tlačítka, přepínače
Tyto tlačítka mohou být instalovány na ovládací hlavici pokud je nutné, aby byly v dosahu prstů obsluhy pokud obsluha
ovládá zařízení dvěmi joysticky a joystick nemůže uvolnit (viz bezpečnostní tlačítko). Například sevřením obsluha přidržuje
bezpečností tlačítko v rukojeti a palcem může ovládat prvky na hlavici ovládací páky. Prakticky se může jednat o jeden nebo dva
pomocné prvky.
Signál nulové polohy: 0
Signál nulové polohy podává informaci o tom, že ovládací páka je v poloze, která nepožaduje aktivaci žádného směru. Pro ovládání
a řízení pomocí joysticku není ani žádoucí, aby docházelo k okamžité aktivaci nějakého výkonového prvku při sebemenším vyklonění
ovládací páky ovladače. K tomuto se zavádí pásmo necitlivosti, které eliminuje mírné výchylky způsobené nepřesností "ruky"
obsluhy. Signál nulové polohy je tedy aktivován nejen v přesně nulové poloze ovládací páky ale i v blízkém okolí nulové polohy.
| Podmínka zapnutí: |
V tomto stavu je možno například zapnout výkonové obvody, připravit je k činnosti protože je zřejmé, že souběžně se zapnutím
není okamžitě požadován pohyb v nějakém směru. |
| Kontrola: |
V tomto stavu je možno provést kontrolu ostatních signálů podle popisu uvedeného v odstavci vačkové/kontaktní sestavy
nebo provést kontrolu spojitého signálu, jestli se nachází v toleranci nulové polohy, obráceně platí i podmínka, že pokud má
spojitý signál nulovou hodnotu, musí být aktivován i snímač nulové polohy. |
Směrové signály: -1/+1
Směrové signály poskytují informaci o tom, v jakém směru osy AX, AY došlo k vychýlení ovládací páky.
Mimo určení směru pohybu má i ten význam, že pohybu přiřazuje první rychlost pohybu.
Rychlostní signály: 2, 3
Rychlostní signály slouží ke změně rychlosti v závislosti na míře vychýlení ovládací páky v daném směru, obecně čím větší výchylka,
tím větší rychlost. Vzhledem k tomu, že
směr pohybu je již určen směrovým signálem, jsou tyto signály sdružené pro oba směry (úspora snímačů). Nejvyšší signál poskytuje
i informaci o dosažení maximální výchylky ovládací páky.
Průběh rychlosti v závislosti na úhlu vychýlení ovládací páky pro binární signály je zobrazen na obrázku 7a, plnou čarou zobrazen průběh
pro sestavu kontaktů 2-0-2, přerušovanou čarou pak zjemnění změny rychlosti pro sestavu 3-0-3.
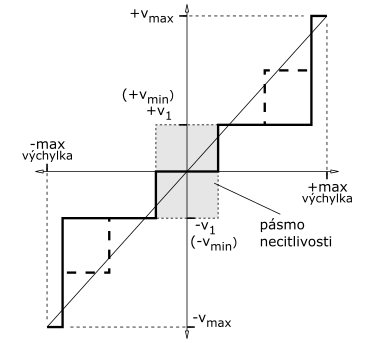
Obrázek 7a, digitální řízení
Průběh rychlosti v závislosti na úhlu vychýlení ovládací páky pro analogové signály je zobrazen na obrázku 7b, průběh rychlosti je možno
pomocnou funkcí upravit tak, aby byl exponenciální, změna rychlosti je v blízkosti nulového bodu pomalejší pro přesnější polohování (přerušovaná čára).
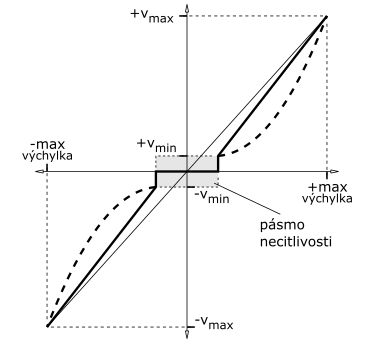
Obrázek 7b, analogové řízení
Vektory rychlosti
Při volbě, nebo stanovení jednotlivých rychlostí u více rychlostního řízení je potřeba vycházet z požadavku polohování, kdy
se volí tak nízká rychlost pohybu, aby obsluha měla možnost včas reagovat na dosažení požadované polohy. Tato podmínka bývá prakticky
splněna ve všech případech. Při stanovení maximální rychlosti je potřeba brát v úvahu dynamiku celé pohybující se soustavy tak,
aby při náhlém zastavení nedošlo k rizikové situaci, poškození. Při pohybu pouze v jednom směru (jedné ose) odpovídá dynamika
rychlosti této osy a hmotnosti pohybující se soustavy.
Komplikovanější případ nastává při současném pohybu koncového bodu ovládaného zařízení ve více osách současně. V tomto případě
se rychlosti všech os vektorově sčítají. Budeme-li uvažovat maximální rychlosti jako 100%, při pohybu soustavě X-Y může výsledná rychlost pohybu dosáhnout až 141,42% a v soustavě X-Y-Z až 173,2%.
|
|
| HMI-AUTOMATIZACE - MECHANIKA - PÁKOVÝ, KŘÍŽOVÝ OVLADAČ - JOYSTICK
|
|
|
Reference:
- Katalogové a konstrukční podklady výrobců.
|